Hittills har en datormus varit en passiv stackare.
Tyckte det var dags att den fick lite eget liv.
Raskt över till bilderna:
Började med att rensa bort allt onödigt:

Sedan bygga och montera H-bryggorna:
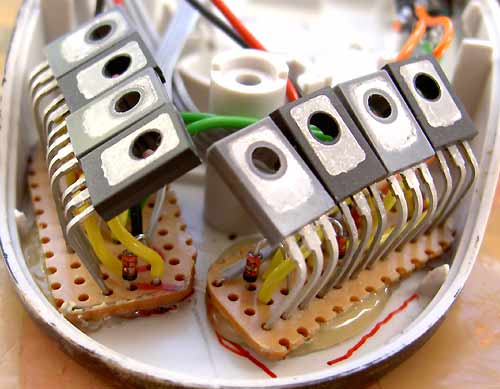
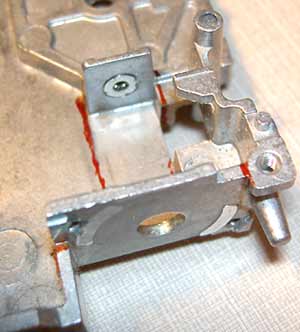
Första motorn är tillfälligt monterad. Det börjar redan bli lite trångt:

Motorn kommer från en diskettstation. Den är inte så jättestark, men musen kommer inte väga särskillt mycket så det verkar gå bra. Motorn och H-bryggorna diskuterades förresten i den här tråden. Där finns även schemat för H-bryggorna. (Det går alltså åt 2st H-bryggor för att driva den första motorn.)
Tekko gav mig den ovärdeliga upplysningen om att dessa motorer inte har någon egen "lagring". Den sitter istället i diskettstation-chassit.
Därför blir det en del kapning med Dremel-kopian.
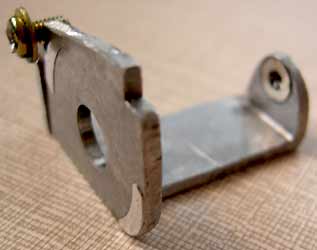
En bild innan kapningen:
En robot utan "hjärna" är som en Jimmy utan RedBull. Här pratades det därför robotprogrammering.
En bild på styrelektroniken så här långt:
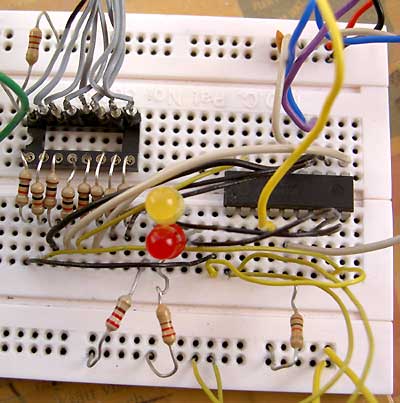
Senare kommer även roboten få IR-syn för att upptäcka hinder framför sig.
Tja, det är så långt jag kommit nu.
Nästa steg blir att kapa och montera motorns lager.