


Min första tanke efter att jag bestämt mig för att börja bygga en var att det var en orginell idé, någonting som inte så många amatörer har gjort på sin fritid och att det skulle bli svårt att hitta information om hur man skulle börja, vilka material man ska använda, vilka komponenter osv. Någonting som skulle göra det extremt svårt för mig då jag inte sitter med enorma kunskaper varken om elektronik, tryck, programmering eller flytkraft mm.
Detta visade sig vara helt fel, det finns en ganska stor kunskapsbank från hemmabyggare att tillgå på internet vilket både var lite av en besvikelse för mig men även en enorm hjälp för att komma igång. Jonas ROV på detta forumet var en av de första jag läste om innan jag satte igång till exempel och anledningen till varför jag valde att berätta om mitt projekt här och även förhoppningsvis få lite hjälp med vissa aspekter av bygget.
Tanken är att jag skall använda den i insjöar och klara djup på ca: 30m till att börja med.
Som de flesta hemmabyggen jag har läst om på nätet så kommer ramen till min UROV vara gjord av PVC-rör som jag kommer perforera lite här och där med en borr för att slippa bry mig om att det skall vara vattentätt. Flytkraten skall istället komma från 2 behållare anpassade till den slutgiltliga viken på min UROV så att den blir "viktlös" i vattnet.
Motorerna jag har valt att använda är 4st 12v DC borstmotorer. 2st Whale Orca 1100Gph (för fram/back och svänga vänster/höger) och 2st Whale Orca 950Gph (för upp/ned och strafe vänster/höger). Varför har jag valt 2 olika storlekar på motorerna underar ni säkert nu och svaret är att det inte fanns 4st av samma sort i affären jag var i. Motorerna är strippade från sina höljen och jag kommer köra dem helt oskyddade i vattnet (fungerade utmärkt i badkaret, får se hur länge det fungerar i smutsigt sjövatten). Som tur är var länspumparna hyfsat billiga så visar det sig att detta inte blir bra har jag inte slängt allt för mycket pengar i sjön, ha ha ha...
Propellrarna till mina motorer är Robbe 50mm 3-bladspropellrar med M4 gängor som jag antingen limmar fast med epoxy eller tillverkar någon form av koppling till så att de blir löstagbara.
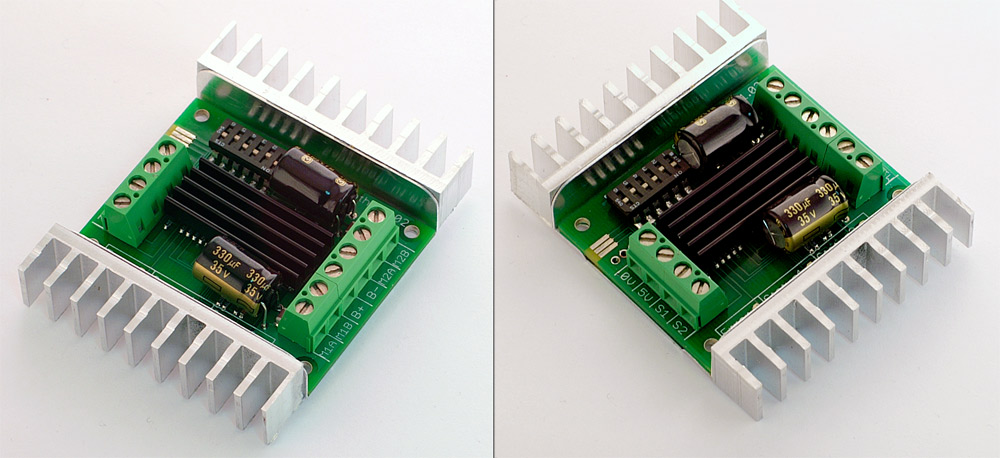
För att kontrollera hastigheten på motorerna köpte jag 2st Sabertooth 2x10 motorstyrningar. Var och en av motorstyrningarna skall klara en kontinuerlig drift på 10A per kanal (vilket är 2) med peak:ar på 15A under kortare tid. Någonting jag hoppas skall räcka gott och väl.
För att kontrollera motorstyrningarna m.m. har jag införskaffat mig en Arduina Mega 2560 Microkontroller med en Ethernet Shield för att använda som hjärta i min UROV och komminucera genom en ethernetkabel med en laptop på land.
Strömförsörjningen kommer vara ett bilbatteri stationärt på UROV:en för att slippa bry mig om att tappa kraft till motorerna genom att dra matarströmen genom långa, tunna kablar (eller långa, tjocka för den delen med tanke på vikt och motstånd i vattnet).
Kameran jag kommer använda är en 12v analog övervakningskamera av modellen som sitter i spårvagnarna i Göteborg. Bildkvalitén är inte fantastiskt men den är i färg och skall nog duga tills jag hittar nåt bättre.
Det är så långt jag har kommit med att införskaffa hårdvara.
Det jag jobbar på nu är givare och sensorer vilket är mer eller mindre grekiska för mig. Jag vet vad jag vill ha men inte vad jag bahöver för att få det att fungera.
Min analoga temperatursensor tror jag i alla fall kommer bli en LM335Z/NOPB från Elfa för hela 8.99SEK. Rätta mig gärna om detta skulle vara ett knasigt val, jag har inte beställt den än
Elektroniska kompass har jag inte riktigt lyckats förstå mig på än. Om någon har en idé så är jag idel öra.
För att mäta dupet min UROV befinner sig på är min tanke att använda en analog trycksensor. Dock finns det ju en hel del olika sensorer (differentiella, absoluta etc.) och jag har inte blivit övertygad om vilken som är den bästa för att använda under vattnet och för ett tryck på upp till 3bar. Även här hade idéer varit till stor hjälp.
För belysning lutar det åt ljusstarka diodrar, men har ingen aning om hur dom fungerar eller hur jag styr dem från min Arduino. Men med tanke på hur mycket jag har lärt mig än så länge känns det inte som ett jättehinder.
Nästa stora hinder dock kommer att bli min manipulator-arm som jag inte ens har hunnit börja fundera på än, eller ja lite har jag ju funderat men det är långt ifrån någonting konkret än så länge.
Detta får räcka för tillfället, är lite mosig i huvudet efter att ha knåpat ihop denna text men kommer fortsätta uppdatera med bilder och information allt eftersom projektet fortskrider. Kom gärna med synpunkter och frågor då jag hoppas att detta forum kan hjälpa mig skynda på processen att färdigställa min robot.
Edit: Lagt till lite egna bilder.






