

Abene VHF3 -> CNC

Nja, det var så att jag i de begynnande testerna av HP-UHU servot tyckte mig se en väsentlig skillnad mellan hur det fungerade när jag körde med LPT-porten respektive med en pulsgenerator. DÅ var jag säker på att det var jitter på pulståget från LPT-porten som gjorde att det inte fungerade riktigt och skaffade därför en Smoothstepper för att "bevisa" att så var fallet.
MEN problemet VAR inte jitter i sig utan det faktum att de filter-kondingar som designats in i HP-UHU servot var "för stora" så nu fungerar det lika bra med LPT-porten som med Smoothsteppern.
Men när jag ändå har den så kan jag lika gärna använda den och den ger mig en del fördelar. Jag når nu mina 83kHz steg-frekvens utan problem och Smoothsteppern kan dessutom "hålla koll på" positionen vid nödstopp etc.
Skall försöka testa Renco encodern mer ordentligt imorgon, sen bär det åter igen av FRAMÅT med det här projektet - äntligen.
MEN problemet VAR inte jitter i sig utan det faktum att de filter-kondingar som designats in i HP-UHU servot var "för stora" så nu fungerar det lika bra med LPT-porten som med Smoothsteppern.
Men när jag ändå har den så kan jag lika gärna använda den och den ger mig en del fördelar. Jag når nu mina 83kHz steg-frekvens utan problem och Smoothsteppern kan dessutom "hålla koll på" positionen vid nödstopp etc.
Skall försöka testa Renco encodern mer ordentligt imorgon, sen bär det åter igen av FRAMÅT med det här projektet - äntligen.
Jo, visst kollade jag. Grejen var den att när jag matade servot med pulser från en funktionsgenerator så verkade det fungera men när jag körde med Mach3 så gick det inte. Jag drog slutsatsen (felaktigt) att UHU-chippet var extra känsligt för jitter och beställde Smoothstppern.
Senare visade detta sig bero på de två filter-kondingarna för encoder-signalerna och nu fungerar det alldeles utmärkt med Mach3 och LPT-porten. Varför felet doldes med ett pulståg av "högre kvalitet" vet jag inte men nu fungerar det. (Utom med USDigital encodern vill säga).
Det har varit en extremt lång och seg resa att bena ut de här problemen men nu verkar det äntligen som att det är löst. Har kört motorn flera timmar idag utan att se några som helst problem Datorn och LPT-porten fixar köra Mach3 i 100kHz.
Datorn och LPT-porten fixar köra Mach3 i 100kHz.
Senare visade detta sig bero på de två filter-kondingarna för encoder-signalerna och nu fungerar det alldeles utmärkt med Mach3 och LPT-porten. Varför felet doldes med ett pulståg av "högre kvalitet" vet jag inte men nu fungerar det. (Utom med USDigital encodern vill säga).
Det har varit en extremt lång och seg resa att bena ut de här problemen men nu verkar det äntligen som att det är löst. Har kört motorn flera timmar idag utan att se några som helst problem
Även om datorn klarar att köra Mach3 i 100kHz så är det inte så snällt mot den. Smoothsteppern producerar ledigt den pulsfrekvensen, dessutom med mycket högre "kvalitet", jag får en extra "LPT-port" + ytterligare några I/O för MPG etc på köpet.
I princip kan "positionskollen" göras med LPT-drivern också men det behövs två LPT-portar och frkevensen är begränsad.
Som sagt, jag hade antagligen inte köpt Smoothsteppern NU men när jag ändå redan har den så kan jag lika gärna använda den.
I princip kan "positionskollen" göras med LPT-drivern också men det behövs två LPT-portar och frkevensen är begränsad.
Som sagt, jag hade antagligen inte köpt Smoothsteppern NU men när jag ändå redan har den så kan jag lika gärna använda den.
-
Mizzarrogh

- Inlägg: 25121
- Blev medlem: 10 september 2006, 12:32:49
- Ort: Somewhere over the rainbow... (Hälsingeskogen)
En spontan fundering, hur är UHU drivarna, hade för mig de borde ligga litet i underkant, eller precis på gränsen, eller är detta en senare modell?
Ser fram mot vidare hårdtest av dem.
(törs man fråga om det möjligen finns fler närbilder på de nya korten? (men de kanske inte var färdigmonterade ännnu))
Mycket intressant med en sådan här jämförelse där drivarna ställdes mot varandra i skarpt läge sas.
Ser fram mot vidare hårdtest av dem.
(törs man fråga om det möjligen finns fler närbilder på de nya korten? (men de kanske inte var färdigmonterade ännnu))
Mycket intressant med en sådan här jämförelse där drivarna ställdes mot varandra i skarpt läge sas.
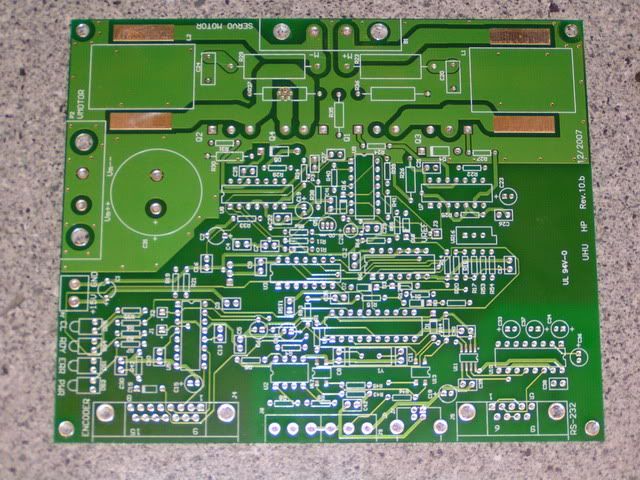
Det finns olika inkarnationer av UHU-servot. Själva CPU'n är den samma (en ATMEL uC) men resten är lite olika beroende på vilken version vi pratar om. Dom jag har kallas för HP-UHU och är ett projekt som startade på CNCZone, Hugo Mazias har gjort designen och Irfan Ulla och Paul Harshman säljer dom i "kit-form" eller bara kretskortet. CPU'n får man beställa direkt från Uli Huber i Tyskland. Själv har jag varit med som lite av en "beta-testare" kan man väl säga.
Nu vet jag inte vad du menar med 'underkant' men i fallet med mina motorer så visst, det hade inte skadat med lite kräm till för acceleration etc men det är inte lätt att hitta ett drivsteg som fixar det utan att kosta massor.
HP-UHU fixar 160V och upp till 25A, halvledarna klarar lite till men induktorerna i RCL filtret på utgången mättas vis 25A. Jag ska erkänna att jag var skeptisk i början, just för att jag vet att det ÄR svårt att hantera så här höga effekter (titta på Rutex t.ex) och visst har det strulat men inte det minsta med effektsteget. Vi får se hur det går när dom väl hamnar på maskinen men jag är optimistisk.
Nackdelen som jag ser det är den något begränsade steg-frekvensen. På Uli's hemsida står det att CPU'n klarar 150-300kHz beroende lite på vilka inställningar man har men jag kommer inte över 130kHz. Så man får välja encododer upplösning noga om man vill ha ut max fart.
Här kommer några bilder på mina HP-UHU, om det är något särkillt du vill "se" så ordnar vi det.




Nu vet jag inte vad du menar med 'underkant' men i fallet med mina motorer så visst, det hade inte skadat med lite kräm till för acceleration etc men det är inte lätt att hitta ett drivsteg som fixar det utan att kosta massor.
HP-UHU fixar 160V och upp till 25A, halvledarna klarar lite till men induktorerna i RCL filtret på utgången mättas vis 25A. Jag ska erkänna att jag var skeptisk i början, just för att jag vet att det ÄR svårt att hantera så här höga effekter (titta på Rutex t.ex) och visst har det strulat men inte det minsta med effektsteget. Vi får se hur det går när dom väl hamnar på maskinen men jag är optimistisk.
Nackdelen som jag ser det är den något begränsade steg-frekvensen. På Uli's hemsida står det att CPU'n klarar 150-300kHz beroende lite på vilka inställningar man har men jag kommer inte över 130kHz. Så man får välja encododer upplösning noga om man vill ha ut max fart.
Här kommer några bilder på mina HP-UHU, om det är något särkillt du vill "se" så ordnar vi det.
-
Mizzarrogh
- Inlägg: 25121
- Blev medlem: 10 september 2006, 12:32:49
- Ort: Somewhere over the rainbow... (Hälsingeskogen)
Intressant detta, som sagt, jo, en del av mina funderingar var hur de funkade ihop med litet större motorer, eftersom detta är första gången jag sett dem användas i praktiken i en sådan tillämpning, med den nya versionen (de äldre var ju mer för mindre grejer och klarade inte så stora effekter har jag för mig).
Var litet (extra)nyfiken på hur det blev med uppföljarna till just UHU korten.
-------------------------------
(Som vanligt grymt snyggt att titta på med. )
Var litet (extra)nyfiken på hur det blev med uppföljarna till just UHU korten.
-------------------------------
(Som vanligt grymt snyggt att titta på med.
Det har väl inte hänt så hemskt mycket dom senaste dagarna. Jag har monterat encoder på de två kvarvarande motorerna och provkört en av dom, och det fungerar alldeles utmärkt. Jag har även varit i kontakt med USDigital och dom säger att jag kan skicka tillbaks mina E7P encoders för "utvärdering" men jag får stå för omkostnaderna fram tills dess att dom eventuellt hittar något galet...så jag har en känsla av hur det kommer att gå. Har inte bestämmt mig ännu men det kan ju vara värt ett par hundringar i frakt....
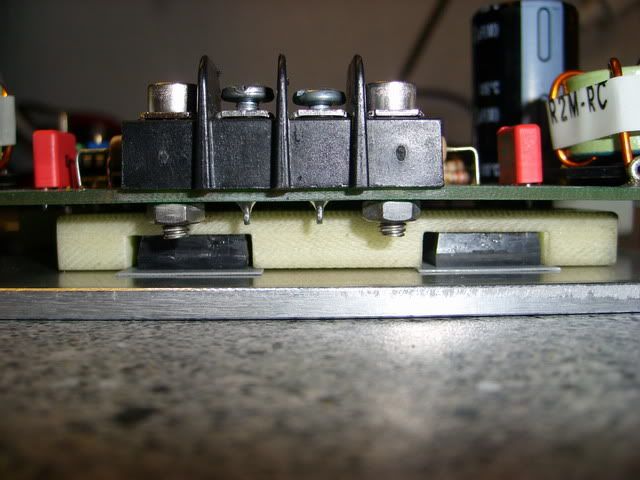
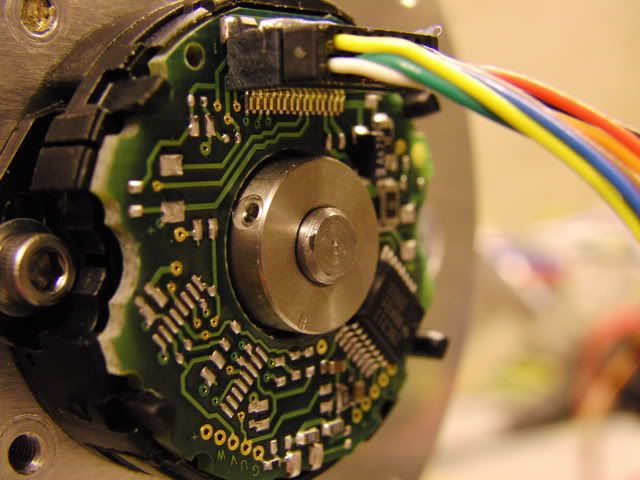
Här kommer ett par bilder till i alla fall, först en närbild på en Renco R35i encoder:
Sen Z-axelns servo, filter och säkring sitter på det understa kortet och det övre är bara en enkel regulator som tar ner 24VDC till 15VDC som servo-drivaren vill ha. 130VDC och 15VDC in på "vänsterkanten (i bilden) och ut till motorn i överkant.

Jag har utövat lite "träslöjd" också de senaste två kvällarna. Tänkte att jag behövde ett "ställ" till verktygen (om/när maskinen blir färdig), det blev så här:

Ska finputsas lite och få ett par lager färg men det blev rätt bra.
Här kommer ett par bilder till i alla fall, först en närbild på en Renco R35i encoder:
Sen Z-axelns servo, filter och säkring sitter på det understa kortet och det övre är bara en enkel regulator som tar ner 24VDC till 15VDC som servo-drivaren vill ha. 130VDC och 15VDC in på "vänsterkanten (i bilden) och ut till motorn i överkant.
Jag har utövat lite "träslöjd" också de senaste två kvällarna. Tänkte att jag behövde ett "ställ" till verktygen (om/när maskinen blir färdig), det blev så här:
Ska finputsas lite och få ett par lager färg men det blev rätt bra.
-
CNC Viking

- Inlägg: 550
- Blev medlem: 13 oktober 2008, 22:18:30
- Ort: Värnamo
- Kontakt:
Arbetet fortskrider....känns lite meningslöst att visa fler bilder på montageplaten även om det händer lite grann där. Samtliga servon är monterade, lite mer kabeldragning för diverse övervakninget etc är klart och en plint-rad som senare kommer att sitta på insidan av själva skåpet hänger på en plåtvinkel vid sidan av....
Till denna plintrad ansluts kabels från manöverpanelen och det är här som dom senaste dagarna har spenderats. Alla tryckknappar etc är kopplade, interfacade till PLC'n och Mach3 har börjat konfigureras för att använda dom.
Jag har börjat med mitt nya "GUI" för Mach3 vilket passar min pekskärm betydligt bättre än det ordinarie. Så här ser "Auto-skärmen" ut i dagsläget:

Jag trot jag har fått med det jag använder (och lite extra). Den uppmärksamma kansle lägger märke till att det, bland annat, inte finns någon Cycle-start knapp. Detta är för jag i största möjliga mån vill undvika att maskinen rör sig när JAG inte vill det. Med tanke på att det är en pek-skärm så skulle en spåna eller något annat enkelt kunna "komma åt" en knapp.... Så CycleStart, Stop och Feedhold är en hårdvaruknappar på panelen.
E-Stop och Reset är också lite speciellt, det finns ingen knapp för det heller utan endast indikering. Återställning av nödstop sker med Reset-knappen på panelen. En serie vilkor måste vara uppfyllda och först när nödstoppsreläet i styrningen har aktiverats får Mach3 signal från PLC'n att "aktivera sig".
"JOG-skärmen" börjar även den ta form:

Inte så mycket att säga om den. Jag är inte säker på att alla MPG-mode fortfarande fungerar så eventuellt får jag plock bort dom senare.
Fortfarande mycket jobb kvar men känns det äntligen som att händer lite...6månader efter tidplan....
/Henrik.
Till denna plintrad ansluts kabels från manöverpanelen och det är här som dom senaste dagarna har spenderats. Alla tryckknappar etc är kopplade, interfacade till PLC'n och Mach3 har börjat konfigureras för att använda dom.
Jag har börjat med mitt nya "GUI" för Mach3 vilket passar min pekskärm betydligt bättre än det ordinarie. Så här ser "Auto-skärmen" ut i dagsläget:
Jag trot jag har fått med det jag använder (och lite extra). Den uppmärksamma kansle lägger märke till att det, bland annat, inte finns någon Cycle-start knapp. Detta är för jag i största möjliga mån vill undvika att maskinen rör sig när JAG inte vill det. Med tanke på att det är en pek-skärm så skulle en spåna eller något annat enkelt kunna "komma åt" en knapp.... Så CycleStart, Stop och Feedhold är en hårdvaruknappar på panelen.
E-Stop och Reset är också lite speciellt, det finns ingen knapp för det heller utan endast indikering. Återställning av nödstop sker med Reset-knappen på panelen. En serie vilkor måste vara uppfyllda och först när nödstoppsreläet i styrningen har aktiverats får Mach3 signal från PLC'n att "aktivera sig".
"JOG-skärmen" börjar även den ta form:
Inte så mycket att säga om den. Jag är inte säker på att alla MPG-mode fortfarande fungerar så eventuellt får jag plock bort dom senare.
Fortfarande mycket jobb kvar men känns det äntligen som att händer lite...6månader efter tidplan....
/Henrik.
En milstolpe passerades idag Både X- och Y-motorn under Mach3-kontroll samtidigt:

Det börjar bli trångt på bänken nu så Y-motorn fick "hänga utanför". Nu behöver jag bara färdigställa kablaget för Z-motorn och ordna kontroll över den inbyggda bromsen sen ska alla tre axel-motorerna vara klara.
Har "felsökt" Smoothsteppern lite de senaste dagarna, ibland så tappar den och Mach3 sync om VAR axlarna egentligen är så ett kommando som G1 Y1 skickar den till nån annan position - inte så bra. Först verkade det som att det var min version på Mach3 som var för gammal men sen plötsligt hände det igen, med senaste "release-versionen"....
Mitt lilla encoder-interface verkar fungera även om det såklart skulle strula i början. Det verkade vara störningar på signalerna från mitt kort till Smootshteppern men jag fick inte igång det oavsett hård eller mjukvaru-filter. En nyare version på Plugin'en löste det dock. Så om jag nödstoppar i full fart, vilket gör att servot löser ut och "tappar" motorn så vet ändå Mach3 "vart" motorn är och jag kan uppdatera dess position när nödstoppet åtrerställts.
Har filat en hel del PLC-koden i CUBLOCen och BRAINs i Mach3 också. Min Diagnostics-skärm ser nu ut så här:

Mach3 läser information från PLC'n via MODBUS och visar här om/vad som gick fel. Reset-knappen på panelen återställer (om felet är åtgärdat) fel-statusen i PLC'n, återställer servona, spänningsätter systemet och signalerar sedan till Mach3 att "gå ur" E-stop.
Kvar att fixa förutom Z-motorns kablage är MPG'n, Feed- och Speed-override (har forfarande inte bestämt mig hur jag ska implementera dom), lite logik för hanteringen av gränslägen och spindelstyrningen. Och så lite annat....
Det börjar bli trångt på bänken nu så Y-motorn fick "hänga utanför". Nu behöver jag bara färdigställa kablaget för Z-motorn och ordna kontroll över den inbyggda bromsen sen ska alla tre axel-motorerna vara klara.
Har "felsökt" Smoothsteppern lite de senaste dagarna, ibland så tappar den och Mach3 sync om VAR axlarna egentligen är så ett kommando som G1 Y1 skickar den till nån annan position - inte så bra. Först verkade det som att det var min version på Mach3 som var för gammal men sen plötsligt hände det igen, med senaste "release-versionen"....
Mitt lilla encoder-interface verkar fungera även om det såklart skulle strula i början. Det verkade vara störningar på signalerna från mitt kort till Smootshteppern men jag fick inte igång det oavsett hård eller mjukvaru-filter. En nyare version på Plugin'en löste det dock.
Har filat en hel del PLC-koden i CUBLOCen och BRAINs i Mach3 också. Min Diagnostics-skärm ser nu ut så här:
Mach3 läser information från PLC'n via MODBUS och visar här om/vad som gick fel. Reset-knappen på panelen återställer (om felet är åtgärdat) fel-statusen i PLC'n, återställer servona, spänningsätter systemet och signalerar sedan till Mach3 att "gå ur" E-stop.
Kvar att fixa förutom Z-motorns kablage är MPG'n, Feed- och Speed-override (har forfarande inte bestämt mig hur jag ska implementera dom), lite logik för hanteringen av gränslägen och spindelstyrningen. Och så lite annat....
Re: Nätdelen påbörjad.
H.O skrev: Så här ser schemat ut:

Länkade till den här konstruktionen i en annan tråd och funderade lite...
Om F1 blåser så saknas överspänningsskydd. Denna dumpkrets är bra mycket billigare än något av de drivsteg som den levererar till. Därför undrar jag om inte säkringen bara är en länk som gör att systemet får fler kritiska punkter? Min tanke är, vad spelar det för roll om man bränner en FET jämfört med ett drivsteg, en FET kanske låter eller luktar illa i vart fall ifall den pajar, så att man blir upplyst om att något är fel.
Ett annat sätt att lösa det kunde vara att kortet slår ifrån helt enkelt ifall säkringen går?
Komparatorn i din konstruktion hade väl hysteres pinnar och är en enkel variant? Om man bytte ut den mot en dubbel och lät nyttja den andra till avkänning av säkringen... Jag är inte så haj på sådana här grejer, men det vore roligt ifall du kunde rita upp en tredje revision med dessa "options"
Edit: Jag tänkte inte alls på kretsen nedanför FET,en, den kanske skickar ut en varningssignal när något är på tok? Tänkte först att det bara var en signal om att "dumpning sker"...
Senast redigerad av Fräsen 14 februari 2009, 17:49:24, redigerad totalt 1 gång.

