
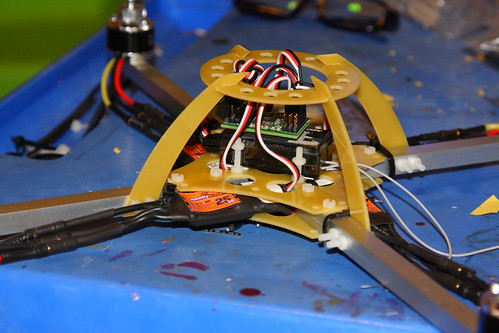
Tänkte göra denna med ett riktigt kamerastativ med pan och tilt, men det är klart att jag kan göra några stycken.
Det kommer lite bilder senare.


Beror väl på om man bara fotar eller även filmar. Om man filmar kanske man vill flyga i en riktning och filma i en annan, och även om det går att flyga i sidled så är det nog enklare att bara vrida kameran.janbjorn skrev:Är det inte effektivare med tilt/roll på kamerastativet? Panoreringen sköter man väl ganska enkelt med att svänga på tri/quad/hexa/octacoptern?
Absolut!hubben skrev:Spännande, berätta vad du gillar Pipon sen.
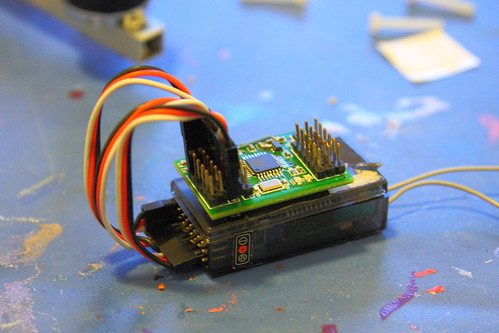
Fullt förståeligt. Jag har följt denna snubbens utveckling av SW till Turnigy 9X radion och med den entusiasm/hastighet han rättar buggar och introducerar ny funktionalitet så är jag (som programmerare till yrket) mycket imponerad! Jag köpte ett Pipo för att jag tröttnade på att strula med Wii-kontroller och annat för att få min quad att funka. Har för lite tid över redan som det är, så jag vill ha en plug-and-play lösning och då tyckte jag denna såg mest attraktiv ut av de jag hittade.hubben skrev:Det jag inte riktigt gillar är att han kränger prylar som inte är färdigutvecklade ännu..
Pipo V2 finns att beställa både med och utan magnometer. GPS ska gå att koppla till. Enligt utvecklaren så kommer V3 kunna ha GPS onboard.PeterH skrev:Jag uppfattade aldrig om den hade GPS eller om det var en option, den hade ju magnometer för att hålla riktning...




