Gimbal\Tri\Quad\Hex IMU styrsystem.
Postat: 10 januari 2011, 18:40:33
Jo även jag har blängt mycket på de dära QuadraCopter projekten som börjar dyka upp överallt.
Första tanken var att kastaihop något rejält från början, för man brukar ångra sig i slutet annars.
Detta skulle innebära att skapa en IMU baserat på 3-axl. gyro,3 axl. accelerometer, barometer, magnetometer och GPS.
När jag började fila på arkitekturen och förutsättningarna så börjar jag inse att det är både komplext och blir relativt dyrt, att få det som jag vill.
Pengar finns men det som skrämmer mig mest är att jag inte klarar matematiken.
Det krävs en högre grad av matematiska kunskaper för att skapa relevanta Kalman filter, och jag har endast gymnasie matte så jag förstår inte ens vad
symbolerna i formlerna representerar.
Slutsatsen blev därför att, jag kommer sannolikt att få problem att bygga hela systemet som jag vill ha det, utan att göra massor med pluggande.
Men jag vill ju fortfarande flyga ??
Så detta projekt baseras helt på beffintliga lösningar vilka är dokumenterat fungerande.
Jag ger i och med detta inte upp tanken på eget system, men jag "mellanlandar" här för inspiration och erfarenhet.
Projektet baseras på denna lösning http://radio-commande.com/international ... er-design/
Detta är primärt inget system för en "komplett aero plattform" och tiden får utvisa vad man egentligen KAN göra med den.
Här finns en länk där dom kör med exakt detta system http://vimeo.com/16479442
Valet baseras på en del uppenbara fördelar.
- Billiga sensorer som är lätta att komma över (Jag betalde 221:- för WM+ och Nunchuck på eBay)
- Färdig styrprogramvara som är lätt att modifiera
- Färdig inställningsprogramvara som fungerar med Windows/mac och Linux
- Expanderbar lösning (Koden har redan stöd för barometer och bättre gyron)
- Tuning "i fält" med hjälp av extern display.
- Inbyggt stöd för kamera tilt/roll
Lösningen är Arduino baserad och koden är öppen (se första länken).
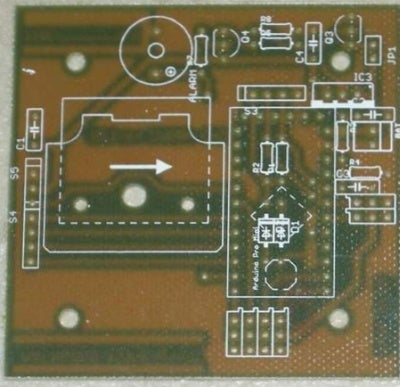
Att nu bara köpa delarna och plocka ihop dom, vore ju inte ett värdigt EF projekt, så jag konstruerade ett kort som har alla funktionerna som jag ville ha.
Kortet är i princip en Arduino Pro Mini med ATmega328 och en tillhörande USB lösning (FTDI) som gör att man kan flasha systemet direkt från Arduino toolchain.
Givetvis är alla nödvändiga anslutningar till radio, sensorer, display och ISP med.
Tog även ut 3V3 för framtida bruk, om man behöver driva sensorer med lägre spänning (Hela kretsen är 5V baserad i övrigt).
Förutsättningarna att expandera är goda då i2c bussen ligger öppen i WII anslutningen, och det finns en del utrymme kvar i Megan.
I helgen så fick ryggen känna av finessen med att pilla dit 0805 komponenter och kortet fick möta lödugnen.
Efter lite joxande med manuella vias och en "felkoppling" så funkar kortet exakt som det skall.
Tog ett foto men hittar inte kabeln till kameran just nu, så ni får nöja er med designen.
Det finns en del "missar", bla jäkligt klen jordning till FTDI'n.
Felkopplingen är dock åtgärdad på denna layout.
Kortet är 62mm i diameter, så det passar nog i de mindre lösningarna med.
I slutändan vart det e billigt och lätthanterlig lösning tycker jag.
1.) På med Arduino booloader via ISP kontakten.
2.) På med MultiWII 1.5 via Arduino toolchain
3.) Starta MultiWII Conf 1.5 och ställ in.
Komponenter för max 200:- och sensorer för 221:-
Tror det blir knepigt att komma billigare undan.
Nu återstår väntan på WII prylarna (HK posten har gått i dvala sedan julrushen tydligen), men under tiden jobbar jag på designen av själva Quadden.
Det känns kul att dela med sig när man jobbat en del på en lösning och det verkligen funkar som tänkt.
Hoppas det var av intresse.
Första tanken var att kastaihop något rejält från början, för man brukar ångra sig i slutet annars.
Detta skulle innebära att skapa en IMU baserat på 3-axl. gyro,3 axl. accelerometer, barometer, magnetometer och GPS.
När jag började fila på arkitekturen och förutsättningarna så börjar jag inse att det är både komplext och blir relativt dyrt, att få det som jag vill.
Pengar finns men det som skrämmer mig mest är att jag inte klarar matematiken.
Det krävs en högre grad av matematiska kunskaper för att skapa relevanta Kalman filter, och jag har endast gymnasie matte så jag förstår inte ens vad
symbolerna i formlerna representerar.
Slutsatsen blev därför att, jag kommer sannolikt att få problem att bygga hela systemet som jag vill ha det, utan att göra massor med pluggande.
Men jag vill ju fortfarande flyga ??
Så detta projekt baseras helt på beffintliga lösningar vilka är dokumenterat fungerande.
Jag ger i och med detta inte upp tanken på eget system, men jag "mellanlandar" här för inspiration och erfarenhet.
Projektet baseras på denna lösning http://radio-commande.com/international ... er-design/
Detta är primärt inget system för en "komplett aero plattform" och tiden får utvisa vad man egentligen KAN göra med den.
Här finns en länk där dom kör med exakt detta system http://vimeo.com/16479442
Valet baseras på en del uppenbara fördelar.
- Billiga sensorer som är lätta att komma över (Jag betalde 221:- för WM+ och Nunchuck på eBay)
- Färdig styrprogramvara som är lätt att modifiera
- Färdig inställningsprogramvara som fungerar med Windows/mac och Linux
- Expanderbar lösning (Koden har redan stöd för barometer och bättre gyron)
- Tuning "i fält" med hjälp av extern display.
- Inbyggt stöd för kamera tilt/roll
Lösningen är Arduino baserad och koden är öppen (se första länken).
Att nu bara köpa delarna och plocka ihop dom, vore ju inte ett värdigt EF projekt, så jag konstruerade ett kort som har alla funktionerna som jag ville ha.
Kortet är i princip en Arduino Pro Mini med ATmega328 och en tillhörande USB lösning (FTDI) som gör att man kan flasha systemet direkt från Arduino toolchain.
Givetvis är alla nödvändiga anslutningar till radio, sensorer, display och ISP med.
Tog även ut 3V3 för framtida bruk, om man behöver driva sensorer med lägre spänning (Hela kretsen är 5V baserad i övrigt).
Förutsättningarna att expandera är goda då i2c bussen ligger öppen i WII anslutningen, och det finns en del utrymme kvar i Megan.
I helgen så fick ryggen känna av finessen med att pilla dit 0805 komponenter och kortet fick möta lödugnen.
Efter lite joxande med manuella vias och en "felkoppling" så funkar kortet exakt som det skall.
Tog ett foto men hittar inte kabeln till kameran just nu, så ni får nöja er med designen.
Det finns en del "missar", bla jäkligt klen jordning till FTDI'n.
Felkopplingen är dock åtgärdad på denna layout.
Kortet är 62mm i diameter, så det passar nog i de mindre lösningarna med.
I slutändan vart det e billigt och lätthanterlig lösning tycker jag.
1.) På med Arduino booloader via ISP kontakten.
2.) På med MultiWII 1.5 via Arduino toolchain
3.) Starta MultiWII Conf 1.5 och ställ in.
Komponenter för max 200:- och sensorer för 221:-
Tror det blir knepigt att komma billigare undan.
Nu återstår väntan på WII prylarna (HK posten har gått i dvala sedan julrushen tydligen), men under tiden jobbar jag på designen av själva Quadden.
Det känns kul att dela med sig när man jobbat en del på en lösning och det verkligen funkar som tänkt.
Hoppas det var av intresse.